I want to do a quackcast on this topic and would really welcome contributions :)
Kroatz and Skoolmunlee did a Quackcast on this for number 39 (https://next.theduckwebcomics.com/quackcast/episode-39-its-my-world-i-can-break-the-rules/), but Mr Wowio guy Jacob (now no longer a Wowio guy) deleted all the early quackcasts to save space and a fe bucks so that no longer exists. :(
So it's time to take another look at this one!!!
How do YOU go about it? What are your thoughts on it in general?
Personally I think that if your world is really different to our own so that it NEEDS building, then you should do a thorough, detailed job of it so that you really know what you're doing and so that the things within it all make sense and feel more real and beleiveable. If you put that work in in the begining it'll be a lot less work as you go along because things in your story will be a lot easier to write and events will make more sense.
BUTTTTTT, all of that world building should stay private knowlegde: you don't tell the reader how things are setup, what the prolitical system of your world is, their farming methods, and world history unless it's really, really needed. No blocks of text explaining all the wars and lines of kigs and queens etc.
Have all that world building be implicit, not explicit: The information should come out naturally from events in the story. If you really need to tell us about the history of the wars that happened then have a character explain it to another character in the context of a conversation about it, a news broadcast or a classroom or something.
-You can always bung all your wolrd building work in an apendix or wiki page for people to research and marvel at. Don't let it weigh down your work.
So that's just my take on it. There's a LOT more to be said and I want to hear it :)
Not many stories even need much world building or any at all. That's important to remember as well.

Start publishing on
DD Comics!
Advertise with us

Comic Talk and General Discussion *
How do you go about World building?
Oz, I completely agree with your points.
…then again, I'm lazy and never do world building properly. I just have a vague idea about the sociopolitical and historical background which is necessary to tell the story, and these vague ideas just ruminate for the years it takes me to work on my comics. So I usually just go back and retcon stuff rather than do the proper work… Which is also why I usually start from the premise that I'm telling stories about the real world and just change single events, or invent fictitious countries, but treat them as if they existed in the real world.
"A.D 1997" has been my most extreme form of world-building, where I have a fictitious country and an alternate history which diverges from ours roughly at around WWI. But many fictitious developments are analogies for what really happens or happened, and I just use them fictitiously to make them more linear and useable in terms of my narrative. So I guess it's more of a "heightened reality" than a fantasy world. "signifikat" exists in a completely undefined fantasy world. "Holon" mostly takes place in this confined space a thousand years in the future, so the history of this world is only told sparsely in small fragments and flashbacks, sprinkled throughout the fabric of the narrative. And "Bombshell" just adds a few fictitious countries to our reality, and it diverges into alternate history only insofar as the main characters occasionally alter history…
I tend to follow the model used in lots of modern Urban Fantasy - that the world looks just like the world you see right outside your window, but behind the scenes are secret powers, beings, and groups that, for whatever reason, have either stayed hidden or are just so recent they haven't had a chance to be revealed yet…
.
A Werewolf novel I wrote a while back (but couldn't get published *shrug*) has a millenia-old culture of shapeshifters that sort of reside in a world of half-dream and are able to make aspect of their dreams physical (my dream-theme stuff gets regurgitated all over the place :)). They (and other groups) have sort of 'erased' the knowledge of their existence from the collective mind of humanity. It's a constant war to keep it that way, and some rogues think it should be done away with completely!
.
My webcomic, the Godstrain, has some pretty hefty stuff going on, but it's all recent and is right on the verge of being known to the public at large. That's something I'm still wrestling with. Modern tech, with mobile cameras and drones available to the public - it just seems hard to keep anything secret for long… especially with big giant IDs-embodiments wrecking the place.
.
So… I guess it's sort of lazy way of world-building - just use the world as it is and add your stuff to it…! But it's a method that really appeals to me!
I worked similar to you Abt and Kim:
Most of Pinky TA was rough and in my head. The world wasn't that different from reality so I didn't think I had to plan much. But THEN, I finished the first part and realised the world was a lot larger than just the small part of it Pinky was playing in - the events that took place in the story were a consequence of history (as all wars are), so I had to get that a bit straighter in my head and expand my knowledge of Pinky's alternate world so I knew what was happening, why it was happening, where, and how.
Lazy world building, when world building (or just plain "scene setting"), is needed can kill a story.
A lot of stories by authors working in the Forgotten Realms/dragonlance/Dugeons and Dragons franchise suffer badly from that flaw. D&D is a fun gaming world for people, but it's definitely NOT set up to be a beleiveable place, it's a paper thin pastiche and if you're not a fan of that gaming universe and read the books as straight stories they are very lacking. They seem to take place in a world of cardboard props with people in bad costumes and fake noses.
A really interesting example of world building in a world with a game at the base of things is the anime series "log Horizon".
In it, thousands of people get trapped inside a fully imersive virtual reality Wolrd of Warcraft style MMPROPG. So far nothing new there though…
This story was vey clever with its mechanics. Rather than treating this setup as an excuse to have humans catapulted into a beleivable aternate world (as this style is usually used), the writers treated it in a more realistic fashion, asking the question:
"How would this world function? How would people who're used to playing a game in a world and who already THINK they have some knowlegde of the world react when they were all trapped in it irretrvably and it started to become their new reality?"
So on one had you get a bit of a lord of the flies thing happening, but on the other you have people working together to use the tactics and the strategies of the game mechanics against itself. You have groups forming aliances, the development of politics, trade, an ecconomy…
Basicially, because the rules of the world are so well defined for the writers they use them to inform and guide the very nature of the story.
Ha I actually tried joining a game of DnD my kids and their friends had going a little while back…! It was… kinda fun but not in anyway meant to be taken seriously! I opened a 'Monster Manual' and started leafing through all these creatures that existed in the world, hordes and hordes of magical beast and undead things, and all of them dangerous and/or 'EVIL!' }:) I remarked that normal creatures like cows and sheep, lions and bears, humans… , etc… didn't have much of a chance in this ecosystem! :D
.
Like I said, it was fun but not 'meaty' enough for me to want to continue! And I think they all had more fun after I quit :)
.
But it does reiterate your point - that some thought should be given as to how the fictional world could really function in a holistic way. Worlds that bend back on themselves, full of self-contadictions, can lose readers… But then, sometimes I think if you have enough eye-candy and stuff getting blown up, it maybe doesn't matter to most (thinking of the paradox soup and idiotic motives and plots that is the world of the Terminator movies - but like everyone else I thought the movie looked cool)!
World building. … I've done loads of it in the past. Mostly for role playing. For comics I've been a little more like abt nihil. Way back with malefic it was real world that got a rude awakening, so from that point forward I was creating a new world around my stories. I didn't need a history just to show how the apocalypse affected the world.
Baso os such a big sprawling setting I settled on a few things and build as I go. The history is essentially mankini d left earth and colonised everywhere and anywhere and offshoots if different societies formed. Anarchists, religious planets. Planets where religion is banned. Corporately owned star systems. Whatever could be imagined. But it became very dog eat dog. someting that I want to explore is different types of society succeeding. Fascist societis. Communist. Anarchist. And the effect they have on nearby societies.
Lore is based upon various role playing campaigns, but much is fresh. I initially had a lot of ideas and set the story to avoid showing too much at first. More recently I have been fleshing the world out with more details creating maps and detailing the social and political structures. I wanted a world that makes a kind of sense, one that is dangerous but survivable. One that has lots of races but not a melting pot of random fantasy ideas. I think it will take a few more stories before anyone can really say if I have succeeded. Similar to kimlusters point about a D&D ecosystem, I want my world to seem mostly believable. I've had to work out magic more than I want to explain. Magic needs to be mysterious. I made the mistake if making Stakken too powerful initially, but worked out a neat way to reign that in. The world needs rules. Healing is another danger. Healing potions… I think not. But healing magic? Yes, but rare and difficult. Beyond most people's grasp. Religion too. Is it real? Is it controlling? I've mentioned to religions so far and not explained too much with either… yet. But largely they are real, but what is the true nature of the gods? Are they really gods or ancient beings who use humans as followers for some self serving reason?
I've written a lot on world-building on a bunch of writing websites back in the day. I even cleared up some historical misconceptions on a well-traveled pitfalls in world building site.
For me world-bulding breaks down into the three C's. Consistency, Connections and Cohesiveness. Consistency is that the world has to follow its own rules. Unless something is touted as exceptional it should follow the systems the world follows. And too many exceptions leads to Mary-sue characters in a Mary-sue world. The "whys" of the world should limit what is possible and keep things following the systems and logic set up for your wordl. And of course the logic for your world doesn't have to be logical for ours. That's part of the joy of world-building. THis culture doesn't follow our rules, but there better be damn good reason.
Second is Connections. Think the old James Burke TV series. Things lead to one another. Things follow a logical progression. Well not laways logical but stuff does lead to other stuff. I had mages that developed spells to mimic microscopes and telescopes (an developed the lenses too using polishing spells) So i figured they'd have germ theory but magic could not be used to kill microbes without killing the patient. Meanwhile they developed synthetic dyes due to mages working with chemistry and that leads to sulfa drugs. Simple progressive development. Things connect to one another.
Third is cohesiveness. Unity. The systems work with each other to create a whole. Edgar Rice Burroughs did a lot of world building outside of Tarzan. Lots of cool botony and animals for his Mars and Venus series. Except the animals were nearly all predators even the domesticated beast of burden in the Mars series. He gave lots of thought to big animals that hunted you but too little to what they hunted when not attacking the characters. It became a standing joke later in his long career. Elephants, rhinos and moose are not carnivores yet they are still dangerous animals. If there is a big predator there should be a big herbivore whose bulk or disposition could kill you.
Info dumps and walls of text are definite no-nos. I created a whole back story alternate post World War II history for Mask of the Aryans and most writers I know would have started off with a prologue or wall o'text explaining it. I barely teased it.
I don't write fantasy or sci-fi (although I tried as a teen and sucked at it), so my world settings have built in physics and politics and technology, which makes things so much earier to get right into the narrative. (One reason I can't watch fantasy anime is that it seems like 80% of any episode is explaining how the magic works and why this new character managed to break some magic barrier to have more power than the others or whatever.) I also don't set things is real known locations because I like having some flexibility and no one to call me on inaccuracies.
When I started Used Books years ago, my plan was a character-centered story that was modern-set, but I couldn't settle on whether to place it in a small town or a city. I weighed a lot of pros and cons. ultimately, I decided a city would provide more opportunities for locations and characters. I could keep the "everyone knows each other" feeling for neighborhood pockets. In some ways, cities are just a bunch of towns in close proximity – with added features like public transportation, cultural centers, etc. The biggest drawback has been artistic. Since I have mostly lived in towns, I rarely see large buildings, so I have to take lots of photos on vacations. I have to learn more about perspective to draw scenes. If you read my comic, you'll probably also notice a distinct lack of crowds where crowds should exist.
The most fun in having a long running serial is that I can have recurring locales in addition to new ones. I created this back in 2010 for fun. Note that I did NOT use this for planning. I was only putting on paper what was already in the comic at the time and then filling in other prossible locales.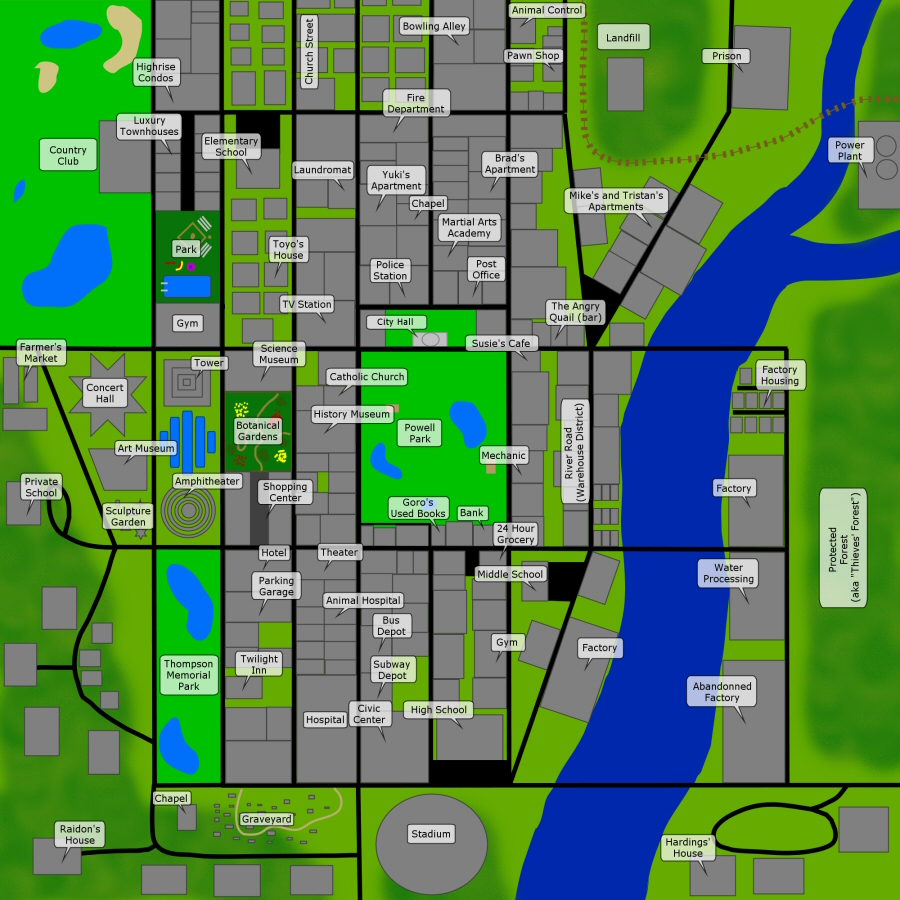
I make blue prints to help plan individual story arcs and locations. It's important both for staging the events and also for drawing backgrounds, which I struggle with often but struggle less when I have a plan.
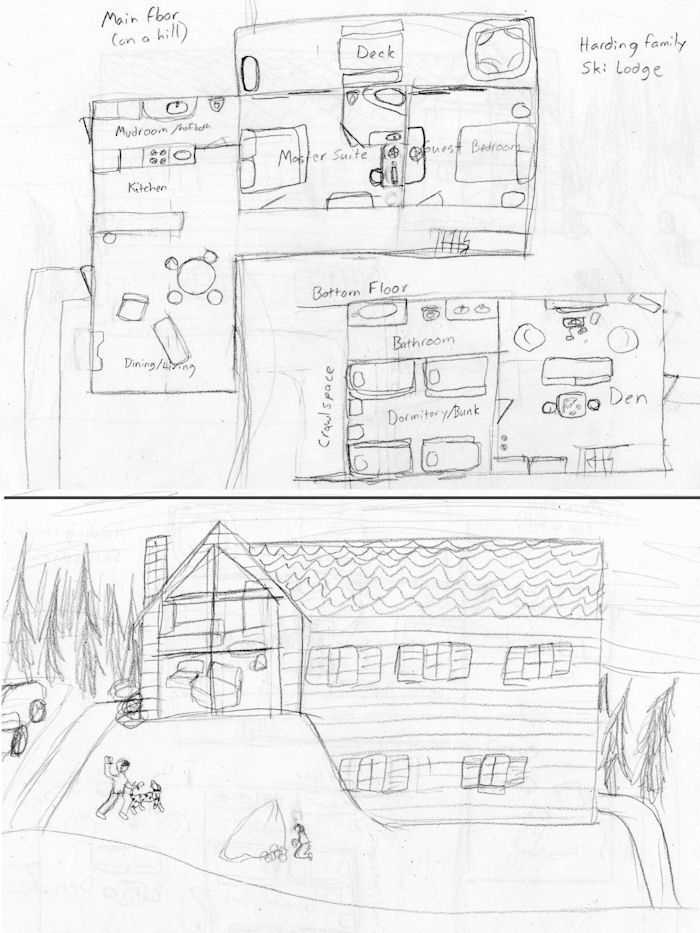
Great stuff used books. I did similar stuff laying out the base for Attack of the Robofemoids and the ships in my comics. I most recently researched floor plans for Star Trek star ships. Having done a fantasy comic I have done loads of mapping. Look at my comic Go a Viking at the obligatory fantasy maps.
Kim and Bravo's point about a world having a blanced ecosystem is good.
Someone could counter that doing that would just be going into TOO much detail, but that's missing the point that the writers messed up their world building to begin with and now need to balance the ecosytem in order to fix it.
In SciFi good world building can create really interesting writing prospects. Jack Vance and Anne McCaffery two of my fave writers and a good world builders. Environmental factors often form parts of their storylines- from the migration pattens of certain animals (or the nasty "thread" in the Pern books) , the "mach" storms on the planet of the Crystal singers, etc.
ozoneocean wrote:All it would have to be is one or two throw away lines about herds of herbivores grazing.
Kim and Bravo's point about a world having a blanced ecosystem is good.
Someone could counter that doing that would just be going into TOO much detail, but that's missing the point that the writers messed up their world building to begin with and now need to balance the ecosytem in order to fix it.
I agree with Anne MAcCaffery as a great world builder. She creates such intriguing animals and environments where that creates conflict! Wow a segue into that recent Quackcast. Use your world to create problems for the characters. Nasty predators is one thing but unique weather. So many stories have just gone with generic jungle or desert with the typcial problems of water. Too much or too little.
But then there is the consideration is it part of the plot? Does it matter? Not yet and we'll sotre that one away for later.
In my experience, I have used two approaches in world building:
On the one end, there is top-down design: Here I will come up with big concepts, from the genesis of the solar system, to evolution, to metaphysical stuff, down to social attitudes and styles of home decoration. I will then derive all my specific scenarios from that. This is usually the process that is required by my clients in my job as a game designer. The final deliverable will be a design guideance manual, which includes lots of reference photos, floor plans, croquis of costumes, maps, color palettes, etc. Tolkien's "Silmarillion" is an example of this approach.
On the other end, there is bottom-up design, which is what I use on my personal projects. As an artist, my inspiration always start out with a bunch of visuals in my head, and then I figure out some kind of flimsy rationale for how those images could possibly occur in a comic. One old comic the I did in the early 90's was about fashion, so the plot had no purpose other than to facilitate as many hairstyle and costume changes as possible.
Interestingly enough, there is now a third approach: procedural world-building. Some programmers are now developing video game engines that build worlds based on mathematical rules. The player can land on a planet, and a computer algorithm will develop the whole geology and ecosystem in a structured, semi-random way. The landscape and alien species will generate themselves as they come into view. The game "No mans's sky" is an example of this approach.
No one's yet mentioned conlanging. That is creating a unique language or languages for your created world. I did it a long time ago even writing dialogue for one story in my created language and working up an evolved dialect. I scoured books on grammar and language, kept a pile of dictionaries with word origins and drove myself crazy. I did this throughout high school and college. It showed up in my D&D campaign. It only survives now as place names on my maps. I realized designing an entire language was overkill. The only place where another language would really matter in a created world would be place names. Honestly having characters speaking in a different language is an unnecessary detail that a writer does not need to burden a reader with.
My invented language still provides me with names but everything I write is in English translated from the original dialogue in whatever languages it is in. When writing dialogue happening in an imaginary world consider if you really want someone in a fantasy world using the 19th century American collquialism "okay" Would a culture that doesn't have a hell ever use the exclamation "damn"? Things like that matter when world building. However exclamations referencing excrement and sex is nearly universal in all human languages.
While I think inventing an entire language, with unique grammar and syntax (think Klingon and Tolkein Elvish) is interesting, I really do think it is overkill. A nod to it is all you need, mostly for personal and place names, and maybe for certain ritualistic acts…
.
But yeah, it is jarring when you here modern 'earthly' colloqualisms in an alien setting! One of my boys was playing this tablet game called 'Clash of Clans' and he was telling me about it - and I didn't even have to fight off disinterests, but then he mentioned a weapon called a 'Tesla' players used in the game. The artifact was lightning-based. This was a medieval fantasy setting… I asked him if he knew that Tesla was a brilliant inventor/scientist around the time of Edison (who stole from and sabotaged much from Tesla)… Even he thought it odd that a medieval game had a reference like that!
.
So yeah, a nod to language matters in the ancient or alien settings!
Tesla is also a unit of measurement in science. So it's like using Watt, Retogen, Curie, or Volt in fantasy settings. Behold my sword Volt! How many fantasy settings that have no relation to anything German use Blitz somewhere?
I am Deorildandr from Jmralatwindr, this is my sword Volt, my axe tesla and my horse blitz.
Hmmm, okay.
I have always been intrigued with the concept of using real-world differences to signify that different languages are in play. The French comic book "Asterix" would use different fonts to signify different languages: German voice-balloons would be typeset in a gothic font, and Greek characters' balloons would have a grecian-looking font, etc.
In subsequent chapters of "Rimjob," I was going to use distinct colloquialisms to signify different languages. Hence, Elvish speech was going to be peppered with Brookly Italian colloquialisms like "Fuhgaeddaboudit", and Giants were going to use lots of Yiddish expressions, like "Schlimazel" and "Oy Gevalt"
fallopiancrusader wrote:Tantz Aerine's comics do that though she just uses different colors.
I have always been intrigued with the concept of using real-world differences to signify that different languages are in play. The French comic book "Asterix" would use different fonts to signify different languages: German voice-balloons would be typeset in a gothic font, and Greek characters' balloons would have a grecian-looking font, etc.
In subsequent chapters of "Rimjob," I was going to use distinct colloquialisms to signify different languages. Hence, Elvish speech was going to be peppered with Brookly Italian colloquialisms like "Fuhgaeddaboudit", and Giants were going to use lots of Yiddish expressions, like "Schlimazel" and "Oy Gevalt"And of course ogres are Scottish. "Shet ep Don-ke."
bravo1102 wrote:I suppose…. I suppose it's not really worse than using words like Barbarian, Valkyrie, and Amazon in non-Earth settings as well (all of them have distinct original(and earth-language specific) meanings a bit different than the connotations they induce now!)
Tesla is also a unit of measurement in science. So it's like using Watt, Retogen, Curie, or Volt in fantasy settings. Behold my sword Volt! How many fantasy settings that have no relation to anything German use Blitz somewhere?
I am Deorildandr from Jmralatwindr, this is my sword Volt, my axe tesla and my horse blitz.
Hmmm, okay.
Barbarian - Non-greek that talks funny
Valkyrie - Chooser of Dead Warriors to take to heaven
Amazon - Without Breast (although there's some debate about that meaning)
Actually I'm saying to use any of them is wrong. Make up you own names not steal them from history unless your wolrd is historical. Use terminolgy properly.
Barbarian now means anyone who is not of our culture, no longer non-Greek(later non-Latin) speakers. Remember CHinese/Japanese terms for outsider/foreigner are translated as barbarian. Big-nosed barbarian. There is also certain Native American words translated as barbarian, which has come to mean outsider with an implication that they are not as good as the culture of the speaker. So a German talking about a Roman owuld call him a barbarian, the same as a Potowan called John Smith barbarian. And Pocahontas said the barbarian was so cute could she keep him…. And the rest is a Disney Movie.
Amazon really doesn't apply to breasts. That's just Greek romance. Amazon may come from proto-slavic or Aryan since the hisotrical Amazons are now accepted to have been Asiatic horse nomads (possibly ancestors of the Slavic and Turkic peoples) Hey we have those female archer burials in the Caucasus. I even used them in one of my unfinished sequels to Go a Viking.
Ahhhh… I didn't quite get your were saying in your first response - all good. Other cultures had equivalents, but the etymology of a word like 'barbarian' is Greek, and it basically was the equivalent of calling someone a 'blah-blah-speaker'. It's very phonetic! Even so, the current connotation is so far from that now that I think it's okay to use the word in a fantasy novel set in a non-earthly reality to describe a 'Savage Warrior'.
.
In any case I don't think we're in any real disagreement!
I have a pet peeve that's slightly similar to Bravo1102's, and it has to do with architecture and the decorative arts. The deisgners of most fantasy-genre worlds in movies and games make an immediate bee-line for medieval European architecture and folk art, even though they have the opportunity to design whatever they want. Indeed, if it's an imaginary world we are creating, it should have uniquely designed buildings, designs, art, and technology. All of these things will appear on the page/screen, and can't be ignored.
In science-fiction, the vernacular for what is a "Futuristic" look hasn't changed since "Star Wars," and that movie came out 38 years ago! Many actual buildings being built today are more "Futuristic" looking than what we see in science fiction movies. Just look at Zaha Hadid's architecture for one example among many. Many producers of sci-fi movies and games seem to be caught in the past, not the future.
In the "Lord of the Rings" movies, most of the buildings were Romanesque or Gothic designs. The Elvish decorative arts were very Art Nouveau. I understand that there is an issue with accessability, and you can't go out into completely pshychedelic territory: Most audiences would be alienated if Minas Tirith were made entirely of soap-bubbles. I just wish designers would push the boundaries a bit more often.
Of course, there are exceptions. David Lynch's "Dune" and Rene Laloux's "Fantastic Planet" come to mind. Comics frequently deliver much more strongly on the promise of design originality, because the risks are lower and there are no budget concerns. "Dead Fingers" and "The Cull" are good examples of this.
Agree with the general point (especially re: Fantasy), but that's a little harsh. Star Wars deserves massive props for popularising the concept of a 'used future' - the idea that the future, like the present, should look lived in. Many subsequent settings used the same concept because it makes sense. For example Firefly arguably looks like Star Wars because it has that same 'used' feeling, even though its influences are quite different. But Avatar doesn't really look like Guardians of the Galaxy doesn't look like Blade Runner doesn't look like Star Trek doesn't look like The Hunger Games doesn't look like the Fifth Element etc. etc.
I'm thinking of giving NaNoWriMo a go again this year. If I do, the story I'm running with is a Fantasy story with… probably not completely original but non-standard races. The main character is from an insectivorous, arboreal tribe of lizard people (a similar ecological niche to monkeys), for example. And the world is largely bronze age, though not in a way that's too reliant on history (you can have waterwheels with Bronze Age tech, right?). Although maybe the transition point from the stone age to the bronze age would fit better. Hmm…
fallopiancrusader wrote:
In science-fiction, the vernacular for what is a "Futuristic" look hasn't changed since "Star Wars," and that movie came out 38 years ago! Many actual buildings being built today are more "Futuristic" looking than what we see in science fiction movies. Just look at Zaha Hadid's architecture for one example among many. Many producers of sci-fi movies and games seem to be caught in the past, not the future.
Advertise with us
DDComics is community owned.
The following patrons help keep the lights on. You can support DDComics on Patreon.
- Banes
- JustNoPoint
- RMccool
- Abt_Nihil
- Gunwallace
- cresc
- PaulEberhardt
- Emma_Clare
- FunctionCreep
- SinJinsoku
- Smkinoshita
- jerrie
- Chickfighter
- Andreas_Helixfinger
- Tantz_Aerine
- Genejoke
- Davey Do
- Gullas
- Roma
- NanoCritters
- Teh Andeh
- Peipei
- Digital_Genesis
- Hushicho
- Palouka
- Cheeko
- Paneltastic
- L.C.Stein
- Zombienomicon
- Dpat57
- Bravo1102
- TheJagged
- LoliGen
- OrcGirl
- Fallopiancrusader
- Arborcides
- ChipperChartreuse
- Mogtrost
- InkyMoondrop
- jgib99
- Call me tom
- OrGiveMeDeath_Ind
- Mks_monsters
- GregJ
- HawkandFloAdventures
- Soushiyo